Pinhole Camera¶
In this module we have all the functions and data structures needed to describe the projection of a 3D scene space onto a 2D image plane.
In computer vision, we can map between the 3D world and a 2D image using projective geometry. The module implements the simplest camera model, the Pinhole Camera, which is the most basic model for general projective cameras from the finite cameras group.
The Pinhole Camera model is shown in the following figure:
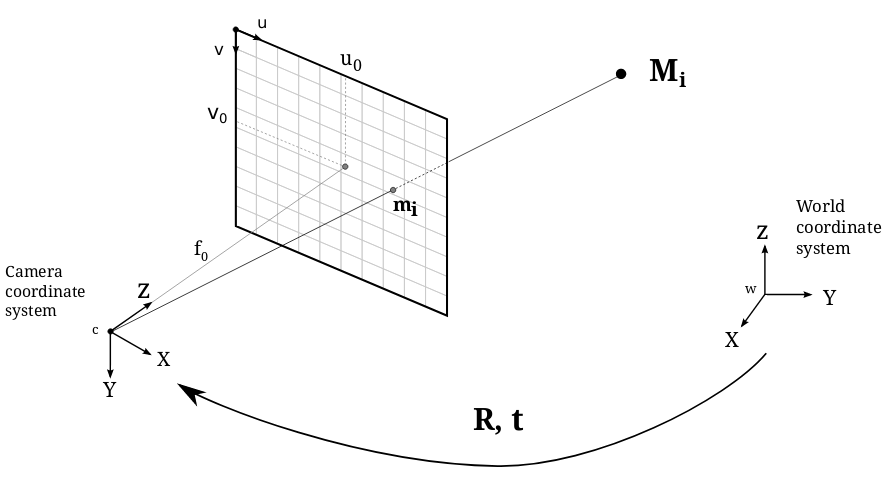
Using this model, a scene view can be formed by projecting 3D points into the image plane using a perspective transformation.
or
- where:
\(M'\) is a 3D point in space with coordinates \([X,Y,Z]^T\) expressed in an Euclidean coordinate frame known as the world coordinate system.
\(m'\) is the projection of the 3D point \(M'\) onto the image plane with coordinates \([u,v]^T\) expressed in pixel units.
\(K\) is the camera calibration matrix, also referred as the intrinsic matrix.
\(C\) is the principal point offset with coordinates \([u_0, v_0]^T\) at the origin in the image plane.
\(fx, fy\) are the focal lengths expressed in pixel units.
The camera rotation and translation are expressed in terms of an Euclidean coordinate frame known as the world coordinate system. These terms are usually expressed by the joint rotation-translation matrix \([R|t]\) which is also known as the extrinsic matrix. It is used to describe the camera pose around a static scene and transforms the coordinates of a 3D point \((X,Y,Z)\) from the world coordinate system to the camera coordinate system.
The PinholeCamera expects the intrinsic matrices and the extrinsic matrices
to be of shape (B, 4, 4) such that each intrinsic matrix has the following format:
And each extrinsic matrix has the following format:
- class kornia.geometry.camera.pinhole.PinholeCamera(intrinsics, extrinsics, height, width)[source]¶
Class that represents a Pinhole Camera model.
- Parameters:
intrinsics (
Tensor) – torch.Tensor with shape \((B, 4, 4)\) containing the full 4x4 camera calibration matrix.extrinsics (
Tensor) – torch.Tensor with shape \((B, 4, 4)\) containing the full 4x4 rotation-translation matrix.height (
Tensor) – torch.Tensor with shape \((B)\) containing the image height.width (
Tensor) – torch.Tensor with shape \((B)\) containing the image width.
Note
We assume that the class attributes are in batch form in order to take advantage of PyTorch parallelism to boost computing performance.
- property batch_size: int¶
Return the batch size of the storage.
- Returns:
scalar with the batch size.
- property camera_matrix: Tensor¶
Return the 3x3 camera matrix containing the intrinsics.
- Returns:
torch.Tensor of shape \((B, 3, 3)\).
- property cx: Tensor¶
Return the x-coordinate of the principal point.
- Returns:
torch.Tensor of shape \((B)\).
- property cy: Tensor¶
Return the y-coordinate of the principal point.
- Returns:
torch.Tensor of shape \((B)\).
- device()[source]¶
Return the device for camera buffers.
- Return type:
- Returns:
Union[str, torch.device, None] type
- property extrinsics: Tensor¶
The full 4x4 extrinsics matrix.
- Returns:
torch.Tensor of shape \((B, 4, 4)\).
- classmethod from_parameters(fx, fy, cx, cy, height, width, tx, ty, tz, batch_size, device, dtype)[source]¶
Construct a batched pinhole camera from scalar parameter tensors.
This helper allocates batched \(4 \times 4\) intrinsic and extrinsic matrices, fills focal lengths/principal point/translation, and wraps them into a
PinholeCamerainstance.- Parameters:
fx (
Tensor) – Horizontal focal length per batch element.fy (
Tensor) – Vertical focal length per batch element.cx (
Tensor) – Principal point x-coordinate per batch element.cy (
Tensor) – Principal point y-coordinate per batch element.height (
int) – Image height in pixels.width (
int) – Image width in pixels.tx (
Tensor) – Camera translation along x per batch element.ty (
Tensor) – Camera translation along y per batch element.tz (
Tensor) – Camera translation along z per batch element.batch_size (
int) – Number of cameras in the batch.device (
Union[str,device,None]) – Target device for the created tensors.dtype (
dtype) – Target floating-point dtype for the created tensors.
- Return type:
- Returns:
Batched
PinholeCameraconfigured from the provided intrinsic and translation parameters.
- property fx: Tensor¶
Return the focal length in the x-direction.
- Returns:
torch.Tensor of shape \((B)\).
- property fy: Tensor¶
Return the focal length in the y-direction.
- Returns:
torch.Tensor of shape \((B)\).
- property intrinsics: Tensor¶
The full 4x4 intrinsics matrix.
- Returns:
torch.Tensor of shape \((B, 4, 4)\).
- intrinsics_inverse()[source]¶
Return the inverse of the 4x4 instrisics matrix.
- Return type:
- Returns:
torch.Tensor of shape \((B, 4, 4)\).
- project(point_3d)[source]¶
Project a 3d point in world coordinates onto the 2d camera plane.
- Parameters:
point_3d (
Tensor) – torch.Tensor containing the 3d points to be projected to the camera plane. The shape of the torch.Tensor can be \((*, 3)\).- Return type:
- Returns:
torch.Tensor of (u, v) cam coordinates with shape \((*, 2)\).
Example
>>> _ = torch.manual_seed(0) >>> X = torch.rand(1, 3) >>> K = torch.eye(4)[None] >>> E = torch.eye(4)[None] >>> h = torch.ones(1) >>> w = torch.ones(1) >>> pinhole = kornia.geometry.camera.PinholeCamera(K, E, h, w) >>> pinhole.project(X) tensor([[5.6088, 8.6827]])
- property rotation_matrix: Tensor¶
Return the 3x3 rotation matrix from the extrinsics.
- Returns:
torch.Tensor of shape \((B, 3, 3)\).
- property rt_matrix: Tensor¶
Return the 3x4 rotation-translation matrix.
- Returns:
torch.Tensor of shape \((B, 3, 4)\).
- scale(scale_factor)[source]¶
Scale the pinhole model.
- Parameters:
scale_factor (
Tensor) – a torch.Tensor with the scale factor. It has to be broadcastable with class members. The expected shape is \((B)\) or \((1)\).- Return type:
- Returns:
the camera model with scaled parameters.
- scale_(scale_factor)[source]¶
Scale the pinhole model in-place.
- property translation_vector: Tensor¶
Return the translation vector from the extrinsics.
- Returns:
torch.Tensor of shape \((B, 3, 1)\).
- property tx: Tensor¶
Return the x-coordinate of the translation vector.
- Returns:
torch.Tensor of shape \((B)\).
- property ty: Tensor¶
Return the y-coordinate of the translation vector.
- Returns:
torch.Tensor of shape \((B)\).
- property tz: Tensor¶
Returns the z-coordinate of the translation vector.
- Returns:
torch.Tensor of shape \((B)\).
- unproject(point_2d, depth)[source]¶
Unproject a 2d point in 3d.
Transform coordinates in the pixel frame to the world frame.
- Parameters:
point_2d (
Tensor) – torch.Tensor containing the 2d to be projected to world coordinates. The shape of the torch.Tensor can be \((*, 2)\).depth (
Tensor) – torch.Tensor containing the depth value of each 2d points. The torch.Tensor shape must be equal to point2d \((*, 1)\).normalize – whether to F.normalize the pointcloud. This must be set to True when the depth is represented as the Euclidean ray length from the camera position.
- Return type:
- Returns:
torch.Tensor of (x, y, z) world coordinates with shape \((*, 3)\).
Example
>>> _ = torch.manual_seed(0) >>> x = torch.rand(1, 2) >>> depth = torch.ones(1, 1) >>> K = torch.eye(4)[None] >>> E = torch.eye(4)[None] >>> h = torch.ones(1) >>> w = torch.ones(1) >>> pinhole = kornia.geometry.camera.PinholeCamera(K, E, h, w) >>> pinhole.unproject(x, depth) tensor([[0.4963, 0.7682, 1.0000]])
- kornia.geometry.camera.pinhole.cam2pixel(cam_coords_src, dst_proj_src, eps=1e-12)[source]¶
Transform coordinates in the camera frame to the pixel frame.
- Parameters:
cam_coords_src (
Tensor) – (x, y, z) coordinates defined in the first camera coordinates system. Shape must be BxHxWx3.dst_proj_src (
Tensor) – the projection matrix between the reference and the non reference camera frame. Shape must be Bx4x4.eps (
float, optional) – small value to avoid division by zero error. Default:1e-12
- Return type:
- Returns:
torch.Tensor of shape BxHxWx2 with (u, v) pixel coordinates.