Local Features and Image Matching¶
This module provides a set of tools to detect and describe local features in images. The module is designed to be compatible with the PyTorch ecosystem and provides a set of models and differentiable operations to be used in deep learning pipelines.
The module is divided into three main components:
Detectors: These are models that are used to detect keypoints in images. The module provides a set of detectors that are based on different algorithms such as Harris, GFTT, Hessian, and DoG. The module also provides a set of detectors that are based on deep learning models such as KeyNet, DISK and DeDoDe.
Descriptors: These are models that are used to describe the local features detected by the detectors. The module provides a set of descriptors that are based on different algorithms such as SIFT, HardNet, and TFeat. The module also provides a set of descriptors that are based on deep learning models such as HyNet, SOSNet, and LAFDescriptor.
Matching: These are models that are used to match the local features detected and described by the detectors and descriptors. The module provides a set of matching algorithms such as nearest neighbor, mutual nearest neighbor, and geometrically aware matching. Besides this, the module also contains AdaLAM hancrafted and LightGlue learned matchers. Finally, the module provides LoFTR - detector-less semi-dense image matching model.
Besides this, the module also provides a set of tools to work with local affine frames (LAF) such as extracting patches, normalizing, denormalizing, and rotating LAFs. The module also provides a set of models to estimate the affine shape of LAFs such as LAFAffineShapeEstimator and PatchAffineShapeEstimator. The module also provides a set of models to estimate the orientation of LAFs such as OriNet and LAFOrienter.
Finally, kind of addition, module contains a DeFMO model for the task of video frame interpolation, specifically high speed objects debluring.
Benchmarks and recommendations¶
The following table shows the performance of the different models on IMC2021 benchmark .
Feature name |
Stereo mAA @ 10 degrees, PhotoTourism. |
Multiview mAA @ 10 degrees, PhotoTourism. |
Stereo mAA @ 10 degrees, PragueParks. |
Multiview mAA @ 10 degrees, PragueParks. |
|---|---|---|---|---|
DISK-LightGlue |
0.6184 |
0.7741 |
0.6116 |
0.4988 |
LoFTR |
0.6090 |
0.7609 |
0.7546 |
0.4711 |
OpenCV-DoG-HardNet-LightGlue |
0.5850 |
0.7587 |
0.6525 |
0.4973 |
OpenCV-DoG-AffNet-HardNet8-AdaLAM |
0.5502 |
0.7522 |
0.5998 |
0.4712 |
Upright SIFT (OpenCV) |
0.5122 |
0.6849 |
0.6060 |
0.4439 |
Feature name |
Stereo mAA @ 10 degrees, PhotoTourism. |
Multiview mAA @ 10 degrees, PhotoTourism. |
Stereo mAA @ 10 degrees, PragueParks. |
Multiview mAA @ 10 degrees, PragueParks. |
|---|---|---|---|---|
DISK-LightGlue |
0.5720 |
0.7543 |
0.5099 |
0.4565 |
OpenCV-DoG-HardNet-LightGlue |
0.3954 |
0.6272 |
0.5157 |
0.4456 |
Upright SIFT (OpenCV) |
0.3827 |
0.5545 |
0.4136 |
0.3607 |
LoFTR works the best for indoor scenes, whereas DISK and DeDoDe + LightGlue work the best for outdoor scenes. The DeDoDe and speed benchmarks are coming soon. For some other use-cases you may want to use SIFT, or SIFT + HardNet + LightGlue, e.g. for remote sensing or medical imaging.
Detectors¶
- kornia.feature.gftt_response(input, grads_mode='sobel', sigmas=None)[source]¶
Compute the Shi-Tomasi cornerness function.

Function does not do any normalization or nms. The response map is computed according the following formulation:
\[R = min(eig(M))\]torch.where:
\[\begin{split}M = \sum_{(x,y) \in W} \begin{bmatrix} I^{2}_x & I_x I_y \\ I_x I_y & I^{2}_y \\ \end{bmatrix}\end{split}\]- Parameters:
input (
Tensor) – input image with shape \((B, C, H, W)\).grads_mode (
str, optional) – can be'sobel'for standalone use or'diff'for use on Gaussian pyramid. Default:"sobel"sigmas (
Optional[Tensor], optional) – coefficients to be multiplied by multichannel response. Should be shape of \((B)\) It is necessary for performing non-maxima-suppression across different scale pyramid levels. See vlfeat. Default:None
- Return type:
- Returns:
the response map per channel with shape \((B, C, H, W)\).
Example
>>> input = torch.tensor([[[ ... [0., 0., 0., 0., 0., 0., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 0., 0., 0., 0., 0., 0.], ... ]]]) # 1x1x7x7 >>> # compute the response map gftt_response(input) tensor([[[[0.0155, 0.0334, 0.0194, 0.0000, 0.0194, 0.0334, 0.0155], [0.0334, 0.0575, 0.0339, 0.0000, 0.0339, 0.0575, 0.0334], [0.0194, 0.0339, 0.0497, 0.0000, 0.0497, 0.0339, 0.0194], [0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000], [0.0194, 0.0339, 0.0497, 0.0000, 0.0497, 0.0339, 0.0194], [0.0334, 0.0575, 0.0339, 0.0000, 0.0339, 0.0575, 0.0334], [0.0155, 0.0334, 0.0194, 0.0000, 0.0194, 0.0334, 0.0155]]]])
- kornia.feature.harris_response(input, k=0.04, grads_mode='sobel', sigmas=None)[source]¶
Compute the Harris cornerness function.

Function does not do any normalization or nms. The response map is computed according the following formulation:
\[R = max(0, det(M) - k \cdot trace(M)^2)\]torch.where:
\[\begin{split}M = \sum_{(x,y) \in W} \begin{bmatrix} I^{2}_x & I_x I_y \\ I_x I_y & I^{2}_y \\ \end{bmatrix}\end{split}\]and \(k\) is an empirically determined constant \(k ∈ [ 0.04 , 0.06 ]\)
- Parameters:
input (
Tensor) – input image with shape \((B, C, H, W)\).k (
Union[Tensor,float], optional) – the Harris detector free parameter. Default:0.04grads_mode (
str, optional) – can be'sobel'for standalone use or'diff'for use on Gaussian pyramid. Default:"sobel"sigmas (
Optional[Tensor], optional) –coefficients to be multiplied by multichannel response. Should be shape of \((B)\) It is necessary for performing non-maxima-suppression across different scale pyramid levels. See vlfeat. Default:
None
- Return type:
- Returns:
the response map per channel with shape \((B, C, H, W)\).
Example
>>> input = torch.tensor([[[ ... [0., 0., 0., 0., 0., 0., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 0., 0., 0., 0., 0., 0.], ... ]]]) # 1x1x7x7 >>> # compute the response map harris_response(input, 0.04) tensor([[[[0.0012, 0.0039, 0.0020, 0.0000, 0.0020, 0.0039, 0.0012], [0.0039, 0.0065, 0.0040, 0.0000, 0.0040, 0.0065, 0.0039], [0.0020, 0.0040, 0.0029, 0.0000, 0.0029, 0.0040, 0.0020], [0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000], [0.0020, 0.0040, 0.0029, 0.0000, 0.0029, 0.0040, 0.0020], [0.0039, 0.0065, 0.0040, 0.0000, 0.0040, 0.0065, 0.0039], [0.0012, 0.0039, 0.0020, 0.0000, 0.0020, 0.0039, 0.0012]]]])
- kornia.feature.hessian_response(input, grads_mode='sobel', sigmas=None)[source]¶
Compute the absolute of determinant of the Hessian matrix.

Function does not do any normalization or nms. The response map is computed according the following formulation:
\[R = det(H)\]torch.where:
\[\begin{split}M = \sum_{(x,y) \in W} \begin{bmatrix} I_{xx} & I_{xy} \\ I_{xy} & I_{yy} \\ \end{bmatrix}\end{split}\]- Parameters:
input (
Tensor) – input image with shape \((B, C, H, W)\).grads_mode (
str, optional) – can be'sobel'for standalone use or'diff'for use on Gaussian pyramid. Default:"sobel"sigmas (
Optional[Tensor], optional) –coefficients to be multiplied by multichannel response. Should be shape of \((B)\) It is necessary for performing non-maxima-suppression across different scale pyramid levels. See vlfeat. Default:
None
- Return type:
- Returns:
the response map per channel with shape \((B, C, H, W)\).
- Shape:
Input: \((B, C, H, W)\)
Output: \((B, C, H, W)\)
Examples
>>> input = torch.tensor([[[ ... [0., 0., 0., 0., 0., 0., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 1., 1., 1., 1., 1., 0.], ... [0., 0., 0., 0., 0., 0., 0.], ... ]]]) # 1x1x7x7 >>> # compute the response map hessian_response(input) tensor([[[[0.0155, 0.0334, 0.0194, 0.0000, 0.0194, 0.0334, 0.0155], [0.0334, 0.0575, 0.0339, 0.0000, 0.0339, 0.0575, 0.0334], [0.0194, 0.0339, 0.0497, 0.0000, 0.0497, 0.0339, 0.0194], [0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000], [0.0194, 0.0339, 0.0497, 0.0000, 0.0497, 0.0339, 0.0194], [0.0334, 0.0575, 0.0339, 0.0000, 0.0339, 0.0575, 0.0334], [0.0155, 0.0334, 0.0194, 0.0000, 0.0194, 0.0334, 0.0155]]]])
- kornia.feature.dog_response_single(input, sigma1=1.0, sigma2=1.6)[source]¶
Compute the Difference-of-Gaussian response.

- class kornia.feature.BlobHessian(grads_mode='sobel')[source]¶
nn.Module that calculates Hessian blobs.
See
hessian_response()for details.
- class kornia.feature.CornerGFTT(grads_mode='sobel')[source]¶
nn.Module that calculates Shi-Tomasi corners.
See
gftt_response()for details.
- class kornia.feature.CornerHarris(k, grads_mode='sobel')[source]¶
nn.Module that calculates Harris corners.
See
harris_response()for details.
- class kornia.feature.BlobDoG[source]¶
nn.Module that calculates Difference-of-Gaussians blobs.
See :func: ~kornia.feature.dog_response for details.
- class kornia.feature.BlobDoGSingle(sigma1=1.0, sigma2=1.6)[source]¶
nn.Module that calculates Difference-of-Gaussians blobs.
See
dog_response_single()for details.
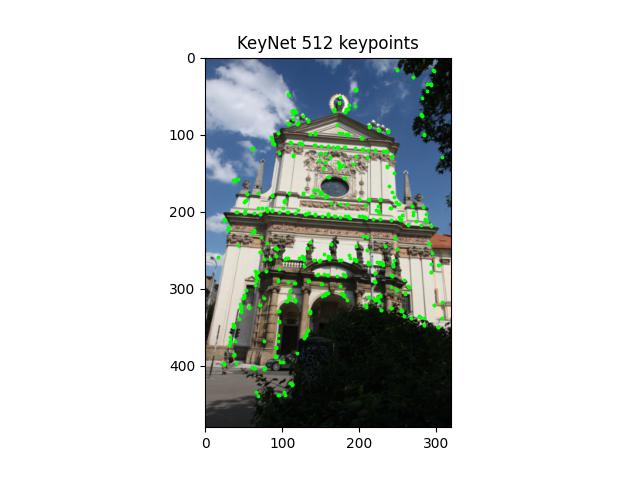
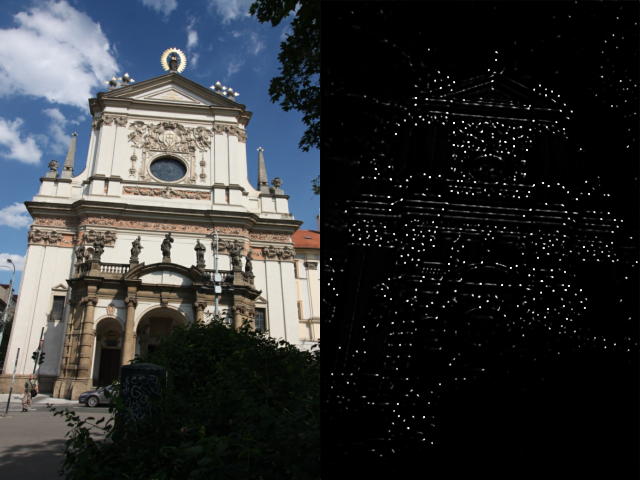
- class kornia.feature.KeyNet(pretrained=False, keynet_conf=None)[source]¶
Key.Net model definition – local feature detector (response function).
This is based on the original code from paper “Key.Net: Keypoint Detection by Handcrafted and Learned CNN Filters”. See [BLRPM19] for more details.

- Parameters:
- Returns:
KeyNet response score.
- Shape:
Input: \((B, 1, H, W)\)
Output: \((B, 1, H, W)\)
- class kornia.feature.MultiResolutionDetector(model, num_features=2048, config=None, ori_module=None, aff_module=None, compile_model=False, score_threshold=0.0)[source]¶
Multi-scale feature detector, based on code from KeyNet. Can be used with any response function.
This is based on the original code from paper “Key.Net: Keypoint Detection by Handcrafted and Learned CNN Filters”. See [BLRPM19] for more details.
- Parameters:
model (
Module) – response function, such as KeyNet or BlobHessiannum_features (
int, optional) – Number of features to detect. Default:2048conf – Dict with initialization parameters. Do not pass it, unless you know what you are doing`.
ori_module (
Optional[Module], optional) – for local feature orientation estimation. Default:PassLAF, which does nothing. SeeLAFOrienterfor details.aff_module (
Optional[Module], optional) – for local feature affine shape estimation. Default:PassLAF, which does nothing. SeeLAFAffineShapeEstimatorfor details.
- detect(img, mask=None)[source]¶
Detect local features in an image batch.
- Parameters:
- Return type:
- Returns:
Tuple containing detection scores and local affine frames. Local affine frames are usually shaped (B, N, 2, 3), where N is the selected feature count.
- detect_features_on_single_level(level_img, num_kp, factor)[source]¶
Detect keypoints on one image-pyramid level.
- Parameters:
- Return type:
- Returns:
Tuple containing scores and local affine frames detected at the requested pyramid level.
- forward(img, mask=None)[source]¶
Three stage local feature detection.
First the location and scale of interest points are determined by detect function. Then affine shape and orientation.
- Parameters:
img (
Tensor) – image to extract features with shape [1xCxHxW]. KeyNetDetector does not support batch processing,
- because the number of detections is different on each image.
- mask: a mask with weights where to apply the response function. The shape must be the same as
the input image.
- Returns:
shape [1xNx2x3]. Detected local affine frames. responses: shape [1xNx1]. Response function values for corresponding lafs
- Return type:
lafs
- class kornia.feature.ScaleSpaceDetector(num_features=500, mr_size=6.0, scale_pyr_module=None, resp_module=None, subpix_module=None, ori_module=None, aff_module=None, minima_are_also_good=False, scale_space_response=False, compile_modules=False)[source]¶
nn.Module for differentiable local feature detection.
As close as possible to classical local feature detectors like Harris, Hessian-Affine or SIFT (DoG).
It has 5 modules inside: scale pyramid generator, response (“cornerness”) function, sub-pixel localization, affine shape estimator and patch orientation estimator. Each of those modules could be replaced with a learned custom one, as long as they respect output shape.
- Parameters:
num_features (
int, optional) – Number of features to detect. In order to keep everything batchable, output would always have num_features output, even for completely homogeneous images. Default:500mr_size (
float, optional) – multiplier for local feature scale compared to the detection scale. 6.0 is matching OpenCV 12.0 convention for SIFT. Default:6.0scale_pyr_module (
Optional[Module], optional) – generates scale pyramid. SeeScalePyramidfor details. Default: ScalePyramid(3, 1.6, 15).resp_module (
Optional[Module], optional) – calculates'cornerness'of the pixel. Default:Nonesubpix_module (
Optional[Module], optional) – performs non-maximum suppression and refines keypoint location to sub-pixel / sub-scale accuracy. SeeConvQuadInterp3dfor details. Default:Noneori_module (
Optional[Module], optional) – for local feature orientation estimation. Default:class:~kornia.feature.PassLAF, which does nothing. SeeLAFOrienterfor details. Default:Noneaff_module (
Optional[Module], optional) – for local feature affine shape estimation. Default:PassLAF, which does nothing. SeeLAFAffineShapeEstimatorfor details.minima_are_also_good (
bool, optional) – if True, then both response function minima and maxima are detected. Useful for symmetric response functions like DoG or Hessian. Default is False. Default:Falsecompile_modules (
Union[bool,List[str]], optional) – selects which sub-modules to wrap withtorch.compile(). PassTrueto compile every sub-module,False(default) for none, or a list containing any subset of["scale_pyr", "resp", "subpix", "ori", "aff"]. Compilingsubpixgives ~5x GPU speedup for the defaultConvQuadInterp3dbackend by fusing its iteration loop. The first call incurs a one-time compilation cost; subsequent calls are fast. Default:False
- forward(img, mask=None)[source]¶
Three stage local feature detection.
First the location and scale of interest points are determined by detect function. Then affine shape and orientation.
- Parameters:
- Returns:
shape [BxNx2x3]. Detected local affine frames. responses: shape [BxNx1]. Response function values for corresponding lafs
- Return type:
lafs
- class kornia.feature.KeyNetDetector(pretrained=False, num_features=2048, keynet_conf=None, ori_module=None, aff_module=None, compile_model=False, score_threshold=0.0)[source]¶
Multi-scale feature detector based on KeyNet.
This is based on the original code from paper “Key.Net: Keypoint Detection by Handcrafted and Learned CNN Filters”. See [BLRPM19] for more details.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:Falsenum_features (
int, optional) – Number of features to detect. Default:2048keynet_conf (
Optional[KeyNet_conf], optional) – Dict with initialization parameters. Do not pass it, unless you know what you are doing`. Default:Noneori_module (
Optional[Module], optional) – for local feature orientation estimation. Default:PassLAF, which does nothing. SeeLAFOrienterfor details.aff_module (
Optional[Module], optional) – for local feature affine shape estimation. Default:PassLAF, which does nothing. SeeLAFAffineShapeEstimatorfor details.
- forward(img, mask=None)[source]¶
Three stage local feature detection.
First the location and scale of interest points are determined by detect function. Then affine shape and orientation.
- Parameters:
img (
Tensor) – image to extract features with shape [1xCxHxW]. KeyNetDetector does not support batch processing,
- because the number of detections is different on each image.
- mask: a mask with weights where to apply the response function. The shape must be the same as
the input image.
- Returns:
shape [1xNx2x3]. Detected local affine frames. responses: shape [1xNx1]. Response function values for corresponding lafs
- Return type:
lafs
Descriptors¶
- class kornia.feature.DenseSIFTDescriptor(num_ang_bins=8, num_spatial_bins=4, spatial_bin_size=4, rootsift=True, clipval=0.2, stride=1, padding=1)[source]¶
nn.Module, which computes SIFT descriptor densely over the image.
- Parameters:
- You might want to set odd number and relevant padding to keep feature map size
spatial_bin_size: Size of a spatial bin in pixels (4 is default) clipval: clipping value to reduce single-bin dominance rootsift: (bool) if True, RootSIFT (Arandjelović et. al, 2012) is computed stride: default 1 padding: default 0
- Returns:
DenseSIFT descriptor of the image
- Return type:
- Shape:
Input: (B, 1, H, W)
Output: (B, num_ang_bins * num_spatial_bins ** 2, (H+padding)/stride, (W+padding)/stride)
- Examples::
>>> input = torch.rand(2, 1, 200, 300) >>> SIFT = DenseSIFTDescriptor() >>> descs = SIFT(input) # 2x128x194x294
- class kornia.feature.SIFTDescriptor(patch_size=41, num_ang_bins=8, num_spatial_bins=4, rootsift=True, clipval=0.2)[source]¶
nn.Module which computes SIFT descriptors of given patches.
- Parameters:
patch_size (
int, optional) – Input patch size in pixels. Default:41num_ang_bins (
int, optional) – Number of angular bins. Default:8num_spatial_bins (
int, optional) – Number of spatial bins. Default:4clipval (
float, optional) – clipping value to reduce single-bin dominance Default:0.2rootsift (
bool, optional) – ifTrue, RootSIFT (Arandjelović et. al, 2012) is computed. Default:True
- Returns:
SIFT descriptor of the patches with shape.
- Shape:
Input: \((B, 1, \text{num_spatial_bins}, \text{num_spatial_bins})\)
Output: \((B, \text{num_ang_bins * num_spatial_bins ** 2})\)
Example
>>> input = torch.rand(23, 1, 32, 32) >>> SIFT = SIFTDescriptor(32, 8, 4) >>> descs = SIFT(input) # 23x128
- class kornia.feature.MKDDescriptor(patch_size=32, kernel_type='concat', whitening='pcawt', training_set='liberty', output_dims=128)[source]¶
nn.Module that computes Multiple Kernel local descriptors.
This is based on the paper “Understanding and Improving Kernel Local Descriptors”. See [MTB+19] for more details.
- Parameters:
patch_size (
int, optional) – Input patch size in pixels. Default:32kernel_type (
str, optional) – Parametrization of kernel'concat','cart','polar'. Default:"concat"whitening (
str, optional) – Whitening transform to applyNone,'lw','pca','pcawt','pcaws'. Default:"pcawt"training_set (
str, optional) – Set that model was trained on'liberty','notredame','yosemite'. Default:"liberty"output_dims (
int, optional) – Dimensionality reduction. Default:128
- Returns:
Explicit cartesian or polar embedding.
- Shape:
Input: \((B, in_{dims}, fmap_{size}, fmap_{size})\).
Output: \((B, out_{dims}, fmap_{size}, fmap_{size})\),
Examples
>>> patches = torch.rand(23, 1, 32, 32) >>> mkd = MKDDescriptor(patch_size=32, ... kernel_type='concat', ... whitening='pcawt', ... training_set='liberty', ... output_dims=128) >>> desc = mkd(patches) # 23x128
- class kornia.feature.HardNet(pretrained=False)[source]¶
Module, which computes HardNet descriptors of given grayscale patches of 32x32.
This is based on the original code from paper “Working hard to know your neighbor’s margins: Local descriptor learning loss”. See [MMRM17] for more details.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:False- Returns:
HardNet descriptor of the patches.
- Return type:
- Shape:
Input: \((B, 1, 32, 32)\)
Output: \((B, 128)\)
Examples
>>> input = torch.rand(16, 1, 32, 32) >>> hardnet = HardNet() >>> descs = hardnet(input) # 16x128
- class kornia.feature.HardNet8(pretrained=False)[source]¶
Module, which computes HardNet8 descriptors of given grayscale patches of 32x32.
This is based on the original code from paper “Improving the HardNet Descriptor”. See [Pul20] for more details.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:False- Returns:
HardNet8 descriptor of the patches.
- Return type:
- Shape:
Input: \((B, 1, 32, 32)\)
Output: \((B, 128)\)
Examples
>>> input = torch.rand(16, 1, 32, 32) >>> hardnet = HardNet8() >>> descs = hardnet(input) # 16x128
- class kornia.feature.HyNet(pretrained=False, is_bias=True, is_bias_FRN=True, dim_desc=128, drop_rate=0.3, eps_l2_norm=1e-10)[source]¶
nn.Module, which computes HyNet descriptors of given grayscale patches of 32x32.
This is based on the original code from paper “HyNet: Learning Local Descriptor with Hybrid Similarity Measure and Triplet Loss”. See [TBLN+20] for more details.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:Falseis_bias (
bool, optional) – use bias in TLU layers Default:Trueis_bias_FRN (
bool, optional) – use bias in FRN layers Default:Truedim_desc (
int, optional) – descriptor dimensionality, Default:128drop_rate (
float, optional) – dropout rate, Default:0.3eps_l2_norm (
float, optional) – to avoid div by zero Default:1e-10
- Returns:
HyNet descriptor of the patches.
- Shape:
Input: \((B, 1, 32, 32)\)
Output: \((B, 128)\)
Examples
>>> input = torch.rand(16, 1, 32, 32) >>> hynet = HyNet() >>> descs = hynet(input) # 16x128
- class kornia.feature.TFeat(pretrained=False)[source]¶
Module, which computes TFeat descriptors of given grayscale patches of 32x32.
This is based on the original code from paper “Learning local feature descriptors with triplets and shallow convolutional neural networks”. See [BRPM16] for more details
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:False- Returns:
TFeat descriptor of the patches.
- Return type:
- Shape:
Input: \((B, 1, 32, 32)\)
Output: \((B, 128)\)
Examples
>>> input = torch.rand(16, 1, 32, 32) >>> tfeat = TFeat() >>> descs = tfeat(input) # 16x128
- class kornia.feature.SOSNet(pretrained=False)[source]¶
128-dimensional SOSNet model definition for 32x32 patches.
This is based on the original code from paper “SOSNet:Second Order Similarity Regularization for Local Descriptor Learning”.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:False
- Shape:
Input: \((B, 1, 32, 32)\)
Output: \((B, 128)\)
Examples
>>> input = torch.rand(8, 1, 32, 32) >>> sosnet = SOSNet() >>> descs = sosnet(input) # 8x128
- class kornia.feature.LAFDescriptor(patch_descriptor_module=None, patch_size=32, grayscale_descriptor=True)[source]¶
nn.Module to get local descriptors, corresponding to LAFs (keypoints).
Internally uses
get_laf_descriptors().- Parameters:
patch_descriptor_module (
Optional[Module], optional) – patch descriptor module, e.g.SIFTDescriptororHardNet. Default:HardNet.patch_size (
int, optional) – patch size in pixels, which descriptor expects. Default:32grayscale_descriptor (
bool, optional) –Trueif patch_descriptor expects single-channel image. Default:True
- class kornia.feature.SOLD2(pretrained=True, config=None)[source]¶
nn.Module, which detects and describe line segments in an image.
This is based on the original code from the paper “SOLD²: Self-supervised Occlusion-aware Line Detector and Descriptor”. See [PautratLinL+21] for more details.
- Parameters:
- Returns:
The raw junction and line heatmaps, the semi-dense descriptor map, as well as the list of detected line segments (ij coordinates convention).
Example
>>> images = torch.rand(2, 1, 64, 64) >>> sold2 = SOLD2() >>> outputs = sold2(images) >>> line_seg1 = outputs["line_segments"][0] >>> line_seg2 = outputs["line_segments"][1] >>> desc1 = outputs["dense_desc"][0] >>> desc2 = outputs["dense_desc"][1] >>> matches = sold2.match(line_seg1, line_seg2, desc1[None], desc2[None])
- forward(img)[source]¶
Run forward.
- Parameters:
img (
Tensor) – batched images with shape \((B, 1, H, W)\).- Returns:
list of N line segments in each of the B images \(List[(N, 2, 2)]\). junction_heatmap: raw junction heatmap of shape \((B, H, W)\). line_heatmap: raw line heatmap of shape \((B, H, W)\). dense_desc: the semi-dense descriptor map of shape \((B, 128, H/4, W/4)\).
- Return type:
line_segments
- kornia.feature.get_laf_descriptors(img, lafs, patch_descriptor, patch_size=32, grayscale_descriptor=True)[source]¶
Get local descriptors, corresponding to LAFs (keypoints).
- Parameters:
img (
Tensor) – image features with shape \((B,C,H,W)\).lafs (
Tensor) – local affine frames \((B,N,2,3)\).patch_descriptor (
Module) – patch descriptor module, e.g.SIFTDescriptororHardNet.patch_size (
int, optional) – patch size in pixels, which descriptor expects. Default:32grayscale_descriptor (
bool, optional) – True ifpatch_descriptorexpects single-channel image. Default:True
- Return type:
- Returns:
Local descriptors of shape \((B,N,D)\) where \(D\) is descriptor size.
Local Features (Detector and Descriptors together)¶
- class kornia.feature.LocalFeature(detector, descriptor, scaling_coef=1.0)[source]¶
nn.Module, which combines local feature detector and descriptor.
- Parameters:
detector (
Module) – the detection module.descriptor (
LAFDescriptor) – the descriptor module.scaling_coef (
float, optional) – multiplier for change default detector scale (e.g. it is too small for KeyNet by default) Default:1.0
- class kornia.feature.SOLD2_detector(pretrained=True, config=None)[source]¶
nn.Module, which detects line segments in an image.
This is based on the original code from the paper “SOLD²: Self-supervised Occlusion-aware Line Detector and Descriptor”. See [PautratLinL+21] for more details.
- Parameters:
config (DetectorCfg) – Configuration object containing all parameters. None will load the default parameters, which are tuned for images in the range 400~800 px. Using a dataclass ensures type safety and clearer parameter management. Default:
Nonepretrained (bool) – If True, download and set pretrained weights to the model. Default:
True
- Returns:
The raw junction and line heatmaps, as well as the list of detected line segments (ij coordinates convention).
Example
>>> img = torch.rand(1, 1, 128, 128) >>> sold2_detector = SOLD2_detector(pretrained=False) >>> line_segments = sold2_detector(img)["line_segments"]
- forward(img)[source]¶
Run forward.
- Parameters:
img (
Tensor) – batched images with shape \((B, 1, H, W)\).- Returns:
list of N line segments in each of the B images \(List[(N, 2, 2)]\). junction_heatmap: raw junction heatmap of shape \((B, H, W)\). line_heatmap: raw line heatmap of shape \((B, H, W)\).
- Return type:
line_segments
- class kornia.feature.ALIKED(model_name='aliked-n16', max_num_keypoints=-1, detection_threshold=0.2, nms_radius=2)[source]¶
ALIKED local feature detector and descriptor.
ALIKED (Adaptive Local Image KEypoint Detection) combines a multi-scale ResNet backbone with deformable descriptor sampling (SDDH) and a differentiable keypoint detector (DKD).
See [ZWC+23] for details.
- Parameters:
model_name (
str, optional) – backbone configuration, one of'aliked-t16','aliked-n16','aliked-n16rot','aliked-n32'. Default:"aliked-n16"max_num_keypoints (
int, optional) – maximum number of keypoints to detect.-1means no limit (threshold-based mode). Default:-1detection_threshold (
float, optional) – minimum detection score in threshold mode. Default:0.2nms_radius (
int, optional) – NMS radius (kernel size= 2 * nms_radius + 1). Default:2
Example
>>> aliked = ALIKED.from_pretrained('aliked-n16') >>> images = torch.rand(1, 3, 256, 256) >>> features = aliked(images)
- forward(images, image_size=None)[source]¶
Detect and describe local features in a batch of images.
- Parameters:
- Return type:
- Returns:
A list of
ALIKEDFeaturesof length B, one per image. Keypoints are in pixel coordinates[x, y].
- forward_laf(img, mask=None, compute_affine=True)[source]¶
Detect and describe local features, returning results in kornia LAF format.
Local Affine Frames are estimated from the soft-argmax weight covariance computed inside
DKD: the 2x2 affine matrix captures the dominant orientation and scale of each detected keypoint without any additional network parameters.All per-image tensors are zero-padded along the keypoint dimension so that the outputs are proper batched tensors.
- Parameters:
img (
Tensor) – image to extract features with shape \((B,C,H,W)\).mask (
Optional[Tensor], optional) – optional spatial mask(B, 1, H, W)with values in[0, 1]; the score map is multiplied by this mask before keypoint detection so that features are suppressed in masked regions. Default:Nonecompute_affine (
bool, optional) – ifTrue(default), estimate the 2x2 affine shape of each LAF usingtorch.linalg.eighon the soft-argmax covariance. Set toFalseto skip the eigendecomposition and return identity affines, which is faster and avoids the linalg call entirely (useful when only keypoint positions are needed). Default:True
- Return type:
- Returns:
Detected local affine frames with shape \((B,N,2,3)\).
Response function values for corresponding LAFs with shape \((B,N,1)\).
Local descriptors of shape \((B,N,D)\).
- classmethod from_pretrained(model_name='aliked-n16', max_num_keypoints=-1, detection_threshold=0.2, nms_radius=2, device=None)[source]¶
Load a pretrained ALIKED model from the official checkpoint repository.
- Parameters:
model_name (
str, optional) – one of'aliked-t16','aliked-n16','aliked-n16rot','aliked-n32'. Default:"aliked-n16"max_num_keypoints (
int, optional) – passed toALIKEDconstructor. Default:-1detection_threshold (
float, optional) – passed toALIKEDconstructor. Default:0.2nms_radius (
int, optional) – passed toALIKEDconstructor. Default:2device (
Optional[device], optional) – target device; defaults to CPU. Default:None
- Return type:
- Returns:
Pretrained
ALIKEDin eval mode.
- class kornia.feature.ALIKEDFeatures(keypoints, descriptors, keypoint_scores)[source]¶
Keypoints, descriptors and scores detected by ALIKED for a single image.
Since ALIKED detects a varying number of keypoints per image,
ALIKEDFeaturesis not batched.- Parameters:
- class kornia.feature.DeDoDe(detector_model='L', descriptor_model='G', amp_dtype=torch.float16)[source]¶
nn.Module which detects and/or describes local features in an image using the DeDode method.
See [EBWF24] for details.
Note
DeDode takes ImageNet normalized images as input (not in range [0, 1]).
- Parameters:
detector_model (
Literal['L'], optional) – The detector model kind. Available options are: L. Default:"L"descriptor_model (
Literal['G','B'], optional) – The descriptor model kind. Available options are: G or B Default:"G"amp_dtype (
dtype, optional) – The automatic mixed precision desired. Default:torch.float16
Example
>>> dedode = DeDoDe.from_pretrained(detector_weights="L-C4-v2", descriptor_weights="B-upright") >>> images = torch.randn(1, 3, 256, 256) >>> keypoints, scores = dedode.detect(images) >>> descriptions = dedode.describe(images, keypoints = keypoints) >>> keypoints, scores, features = dedode(images) # alternatively do both
- describe(images, keypoints=None, apply_imagenet_normalization=True, pad_if_not_divisible=True, crop_h=None, crop_w=None)[source]¶
Describe keypoints in the input images. If keypoints are not provided, returns the dense descriptors.
Note
This method unconditionally sets the model to eval mode via
self.train(False)so that BatchNorm and Dropout behave deterministically. This is intentional: the descriptor is only used at inference time and its statistics must be frozen.- Parameters:
images (
Tensor) – A torch.Tensor of shape \((B, 3, H, W)\) containing the input images.keypoints (
Optional[Tensor], optional) – An optional torch.Tensor of shape \((B, N, 2)\) containing the detected keypoints. Default:Noneapply_imagenet_normalization (
bool, optional) – Whether to apply ImageNet normalization to the input images. Default:Truepad_if_not_divisible (
bool, optional) – Zero-pad the image so H and W are divisible by 14. Required when using theGdescriptor backed by DINOv2 (patch size 14). Ignored forB. Default:Truecrop_h (
Optional[int], optional) – The height of the crop to be used for description. If None, the full image is used. Default:Nonecrop_w (
Optional[int], optional) – The width of the crop to be used for description. If None, the full image is used. Default:None
- Returns:
- A torch.Tensor of shape \((B, N, DIM)\) containing the descriptions
of the detected keypoints. If the dense descriptors are requested, the shape is \((B, DIM, H, W)\).
- Return type:
descriptions
- detect(images, n=10000, apply_imagenet_normalization=True, pad_if_not_divisible=True, crop_h=None, crop_w=None)[source]¶
Detect keypoints in the input images.
Note
This method unconditionally sets the model to eval mode via
self.train(False)so that BatchNorm and Dropout behave deterministically. This is intentional: the detector is only used at inference time and its statistics must be frozen.- Parameters:
images (
Tensor) – A torch.Tensor of shape \((B, 3, H, W)\) containing the input images.n (
Optional[int], optional) – The number of keypoints to detect. Default:10000apply_imagenet_normalization (
bool, optional) – Whether to apply ImageNet normalization to the input images. Default:Truepad_if_not_divisible (
bool, optional) – F.pad image shape if not evenly divisible. Default:Truecrop_h (
Optional[int], optional) – The height of the crop to be used for detection. If None, the full image is used. Default:Nonecrop_w (
Optional[int], optional) – The width of the crop to be used for detection. If None, the full image is used. Default:None
- Returns:
A torch.Tensor of shape \((B, N, 2)\) containing the detected keypoints, normalized to the range \([-1, 1]\). scores: A torch.Tensor of shape \((B, N)\) containing the scores of the detected keypoints.
- Return type:
- forward(images, n=10_000, apply_imagenet_normalization=True, pad_if_not_divisible=True)[source]¶
Detect and describe keypoints in the input images.
- Parameters:
images (
Tensor) – A torch.Tensor of shape \((B, 3, H, W)\) containing the ImageNet-Normalized input images.n (
Optional[int], optional) – The number of keypoints to detect. Default:10_000apply_imagenet_normalization (
bool, optional) – Whether to apply ImageNet normalization to the input images. Default:Truepad_if_not_divisible (
bool, optional) – F.pad image shape if not evenly divisible. Default:True
- Returns:
- A torch.Tensor of shape \((B, N, 2)\) containing the detected keypoints in the image range,
unlike .detect() function.
scores: A torch.Tensor of shape \((B, N)\) containing the scores of the detected keypoints.
- descriptions: A torch.Tensor of shape \((B, N, DIM)\) containing the descriptions
of the detected keypoints. DIM is 256 for B and 512 for G.
- Return type:
- classmethod from_pretrained(detector_weights='L-C4-v2', descriptor_weights='G-upright', amp_dtype=torch.float16)[source]¶
Load a pretrained model.
- Parameters:
detector_weights (
str, optional) – The weights to load for the detector. One of ‘L-upright’ (original paper, https://arxiv.org/abs/2308.08479), ‘L-C4’, ‘L-SO2’ (from steerers, better for rotations, https://arxiv.org/abs/2312.02152), ‘L-C4-v2’ (from dedode v2, better at rotations, less clustering, https://arxiv.org/abs/2404.08928). Default is ‘L-C4-v2’. Default:"L-C4-v2"descriptor_weights (
str, optional) – The weights to load for the descriptor. One of ‘B-upright’,’G-upright’ (original paper, https://arxiv.org/abs/2308.08479), ‘B-C4’, ‘B-SO2’, ‘G-C4’, ‘G-SO2’ (from steerers, better for rotations, https://arxiv.org/abs/2312.02152). Default is ‘G-upright’. Default:"G-upright"amp_dtype (
dtype, optional) – the dtype to use for the model. One of torch.float16 or torch.float32. Default:torch.float16torch.float16 (Default is)
MPS (suitable for CUDA. Use torch.float32 for CPU or)
- Return type:
- Returns:
The pretrained model.
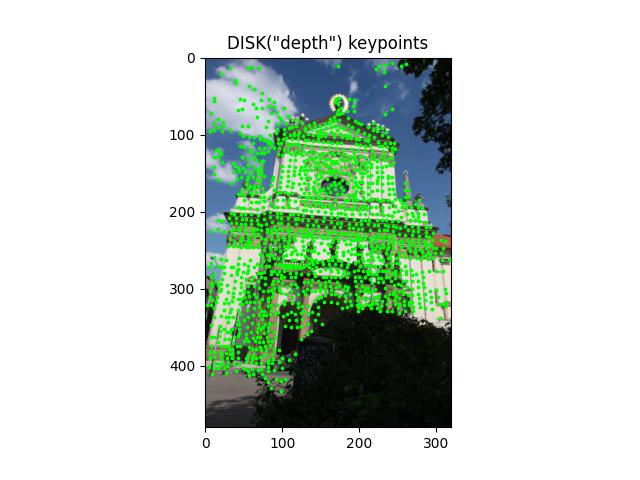
- class kornia.feature.DISK(desc_dim=128, unet=None)[source]¶
nn.Module which detects and described local features in an image using the DISK method.
See [TFT20] for details.
- Parameters:
desc_dim (
int, optional) – The dimension of the descriptor. Default:128unet (
None|Module, optional) – The U-Net to use. If None, a default U-Net is used. Kornia doesn’t provide the training code for DISK so this is only useful when using a custom checkpoint trained using the code released with the paper. The unet should take as input a torch.Tensor of shape \((B, C, H, W)\) and output a torch.Tensor of shape \((B, \mathrm{desc\_dim} + 1, H, W)\). Default:None
Example
>>> disk = DISK.from_pretrained('depth') >>> images = torch.rand(1, 3, 256, 256) >>> features = disk(images)
- forward(images, n=None, window_size=5, score_threshold=0.0, pad_if_not_divisible=False)[source]¶
Detect features in an image, returning keypoint locations, descriptors and detection scores.
- Parameters:
images (
Tensor) – The image to detect features in. Shape \((B, 3, H, W)\).n (
int|None, optional) – The maximum number of keypoints to detect. If None, all keypoints are returned. Default:Nonewindow_size (
int, optional) – The size of the non-maxima suppression window used to filter detections. Default:5score_threshold (
float, optional) – The minimum score a detection must have to be returned. SeeDISKFeaturesfor details. Default:0.0pad_if_not_divisible (
bool, optional) – if True, the non-16 divisible input is zero-padded to the closest 16-multiply Default:False
- Return type:
- Returns:
A list of length \(B\) containing the detected features.
- classmethod from_pretrained(checkpoint='depth', device=None)[source]¶
Load a pretrained model.
Depth model was trained using depth map supervision and is slightly more precise but biased to detect keypoints only where SfM depth is available. Epipolar model was trained using epipolar geometry supervision and is less precise but detects keypoints everywhere where they are matchable. The difference is especially pronounced on thin structures and on edges of objects.

- class kornia.feature.XFeat(top_k=4096, detection_threshold=0.05)[source]¶
XFeat sparse and semi-dense local feature extractor and matcher.
Wraps
XFeatModelwith NMS keypoint detection, descriptor interpolation, and mutual nearest-neighbour matching helpers.- Reference:
“XFeat: Accelerated Features for Lightweight Image Matching”, CVPR 2024. https://www.verlab.dcc.ufmg.br/descriptors/xfeat_cvpr24/

- Parameters:
Example
>>> model = XFeat() >>> img = torch.rand(1, 3, 256, 256) >>> out = model.detectAndCompute(img) >>> out[0]['keypoints'].shape torch.Size([..., 2])
- detectAndCompute(x, top_k=None, detection_threshold=None)[source]¶
Detect sparse keypoints and compute descriptors.
- Parameters:
- Returns:
'keypoints': \((N, 2)\) keypoints in (x, y) pixel coordinates.'scores': \((N,)\) reliability scores.'descriptors': \((N, 64)\) L2-normalised descriptors.
- Return type:
List of length
B. Each element is a dict with
- detectAndComputeDense(x, top_k=None, multiscale=True)[source]¶
Detect keypoints and compute dense coarse descriptors.
- Parameters:
- Returns:
'keypoints': \((B, K, 2)\) coarse keypoints.'descriptors': \((B, K, 64)\) coarse descriptors.'scales': \((B, K)\) extraction scale per keypoint.
- Return type:
Dict with
- forward(*input)[source]¶
Define the computation performed at every call.
Should be overridden by all subclasses.
Note
Although the recipe for forward pass needs to be defined within this function, one should call the
Moduleinstance afterwards instead of this since the former takes care of running the registered hooks while the latter silently ignores them.- Return type:
- classmethod from_pretrained(top_k=4096, detection_threshold=0.05)[source]¶
Instantiate XFeat with pretrained weights downloaded from the official release.
- match_xfeat(img1, img2, top_k=None, min_cossim=-1)[source]¶
Detect, describe and mutually match keypoints from two images.
- Parameters:
img1 (
Tensor) – first image tensor of shape \((1, C, H, W)\).img2 (
Tensor) – second image tensor of shape \((1, C, H, W)\).top_k (
Optional[int], optional) – number of top keypoints to use. Default:Nonemin_cossim (
float, optional) – minimum cosine similarity threshold. Use-1to disable. Default:-1
- Return type:
- Returns:
Tuple
(mkpts0, mkpts1)of matched keypoints, each \((N, 2)\).
- class kornia.feature.XFeatModel[source]¶
XFeat backbone: CNN feature extractor, keypoint and reliability heads.
Implements the architecture from “XFeat: Accelerated Features for Lightweight Image Matching”, CVPR 2024.
Input: float image tensor \((B, C, H, W)\) (grayscale or RGB, any channel count). Output:
feats: dense descriptors \((B, 64, H/8, W/8)\).keypoints: keypoint logits \((B, 65, H/8, W/8)\).heatmap: reliability map \((B, 1, H/8, W/8)\).
Note
Image normalisation (
InstanceNorm2d) is wrapped intorch.no_grad()following the original design; backpropagating through it is not supported.
- class kornia.feature.InterpolateSparse2d(mode='bicubic', align_corners=False)[source]¶
Bilinearly or bicubically sample a dense feature map at sparse 2-D positions.
- Parameters:
mode (
str, optional) – interpolation mode fortorch.nn.functional.grid_sample(). Default:'bicubic'.align_corners (
bool, optional) – passed togrid_sample. Default:False.
- Shape:
Input
x: \((B, C, H, W)\).Input
pos: \((B, N, 2)\) integer or float (x, y) coordinates.Output: \((B, N, C)\).
- class kornia.feature.DISKFeatures(keypoints, descriptors, detection_scores)[source]¶
A data structure holding DISK keypoints, descriptors and detection scores for an image.
Since DISK detects a varying number of keypoints per image, DISKFeatures is not batched.
- Parameters:
keypoints (
Tensor) – torch.Tensor of shape \((N, 2)\), where \(N\) is the number of keypoints.descriptors (
Tensor) – torch.Tensor of shape \((N, D)\), where \(D\) is the descriptor dimension.detection_scores (
Tensor) – torch.Tensor of shape \((N,)\) where the detection score can be interpreted as the log-probability of keeping a keypoint after it has been proposed (see the paper section Method → Feature distribution for details).
- class kornia.feature.SIFTFeature(num_features=8000, upright=False, rootsift=True, device=None, config=None, compile_model=False, score_threshold=0.0)[source]¶
Convenience module, which implements DoG detector + (Root)SIFT descriptor.
Using kornia.feature.MultiResolutionDetector without blur pyramid Still not as good as OpenCV/VLFeat because of https://github.com/kornia/kornia/pull/884, but we are working on it
- class kornia.feature.SIFTFeatureScaleSpace(num_features=8000, upright=False, rootsift=True, device=None, compile_modules=False)[source]¶
Convenience module, which implements DoG detector + (Root)SIFT descriptor.
Using kornia.feature.ScaleSpaceDetector with blur pyramid.
Still not as good as OpenCV/VLFeat because of https://github.com/kornia/kornia/pull/884, but we are working on it
- class kornia.feature.GFTTAffNetHardNet(num_features=8000, upright=False, device=None, compile_modules=False)[source]¶
Convenience module, which implements GFTT detector + AffNet-HardNet descriptor.
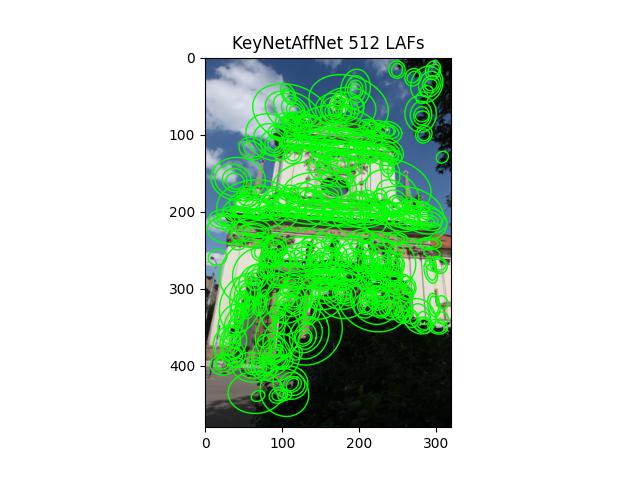
- class kornia.feature.KeyNetAffNetHardNet(num_features=8000, upright=False, device=None, scale_laf=1.0, compile_model=False, score_threshold=0.0)[source]¶
Convenience module, which implements KeyNet detector + AffNet + HardNet descriptor.
- class kornia.feature.KeyNetHardNet(num_features=8000, upright=False, device=None, scale_laf=1.0, compile_model=False, score_threshold=0.0)[source]¶
Convenience module, which implements KeyNet detector + HardNet descriptor.
Matching¶
- kornia.feature.match_nn(desc1, desc2, dm=None)[source]¶
Find nearest neighbors in desc2 for each vector in desc1.
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of \((B1, 1)\).
Long torch.Tensor indexes of matching descriptors in desc1 and desc2, shape of \((B1, 2)\).
- kornia.feature.match_mnn(desc1, desc2, dm=None)[source]¶
Find mutual nearest neighbors in desc2 for each vector in desc1.
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of. \((B3, 1)\).
Long torch.Tensor indexes of matching descriptors in desc1 and desc2, shape of \((B3, 2)\), where 0 <= B3 <= min(B1, B2)
- kornia.feature.match_snn(desc1, desc2, th=0.8, dm=None)[source]¶
Find nearest neighbors in desc2 for each vector in desc1.
The method satisfies first to second nearest neighbor distance <= th.
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
desc1 (
Tensor) – Batch of descriptors of a shape \((B1, D)\).desc2 (
Tensor) – Batch of descriptors of a shape \((B2, D)\).th (
float, optional) – distance ratio threshold. Default:0.8dm (
Optional[Tensor], optional) – torch.Tensor containing the distances from each descriptor in desc1 to each descriptor in desc2, shape of \((B1, B2)\). Default:None
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of \((B3, 1)\).
Long torch.Tensor indexes of matching descriptors in desc1 and desc2. Shape: \((B3, 2)\), where 0 <= B3 <= B1.
- kornia.feature.match_smnn(desc1, desc2, th=0.95, dm=None)[source]¶
Find mutual nearest neighbors in desc2 for each vector in desc1.
the method satisfies first to second nearest neighbor distance <= th.
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
desc1 (
Tensor) – Batch of descriptors of a shape \((B1, D)\).desc2 (
Tensor) – Batch of descriptors of a shape \((B2, D)\).th (
float, optional) – distance ratio threshold. Default:0.95dm (
Optional[Tensor], optional) – torch.Tensor containing the distances from each descriptor in desc1 to each descriptor in desc2, shape of \((B1, B2)\). Default:None
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of. \((B3, 1)\).
Long torch.Tensor indexes of matching descriptors in desc1 and desc2, shape of \((B3, 2)\) where 0 <= B3 <= B1.
- kornia.feature.match_fginn(desc1, desc2, lafs1, lafs2, th=0.8, spatial_th=10.0, mutual=False, dm=None)[source]¶
Find nearest neighbors in desc2 for each vector in desc1.
The method satisfies first to second nearest neighbor distance <= th, and assures 2nd nearest neighbor is geometrically inconsistent with the 1st one (see [MMP15] for more details)
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
desc1 (
Tensor) – Batch of descriptors of a shape \((B1, D)\).desc2 (
Tensor) – Batch of descriptors of a shape \((B2, D)\).lafs1 (
Tensor) – LAFs of a shape \((1, B1, 2, 3)\).lafs2 (
Tensor) – LAFs of a shape \((1, B2, 2, 3)\).th (
float, optional) – distance ratio threshold. Default:0.8spatial_th (
float, optional) – minimal distance in pixels to 2nd nearest neighbor. Default:10.0mutual (
bool, optional) – also perform mutual nearest neighbor check. Default:Falsedm (
Optional[Tensor], optional) – torch.Tensor containing the distances from each descriptor in desc1 to each descriptor in desc2, shape of \((B1, B2)\). Default:None
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of \((B3, 1)\).
Long torch.Tensor indexes of matching descriptors in desc1 and desc2. Shape: \((B3, 2)\), where 0 <= B3 <= B1.
- kornia.feature.match_adalam(desc1, desc2, lafs1, lafs2, config=None, hw1=None, hw2=None, dm=None)[source]¶
Perform descriptor matching, followed by AdaLAM filtering.
See [CLO+20] for more details.
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
desc1 (
Tensor) – Batch of descriptors of a shape \((B1, D)\).desc2 (
Tensor) – Batch of descriptors of a shape \((B2, D)\).lafs1 (
Tensor) – LAFs of a shape \((1, B1, 2, 3)\).lafs2 (
Tensor) – LAFs of a shape \((1, B2, 2, 3)\).config (
Optional[AdalamConfig], optional) – dict with AdaLAM config Default:Nonedm (
Optional[Tensor], optional) – torch.Tensor containing the distances from each descriptor in desc1 to each descriptor in desc2, shape of \((B1, B2)\). Default:Nonehw1 (
Optional[Tuple[int,int]], optional) – Height/width of image. Default:Nonehw2 (
Optional[Tuple[int,int]], optional) – Height/width of image. Default:None
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of \((B3, 1)\).
Long torch.Tensor indexes of matching descriptors in desc1 and desc2. Shape: \((B3, 2)\), where 0 <= B3 <= B1.
- class kornia.feature.DescriptorMatcher(match_mode='snn', th=0.8)[source]¶
nn.Module version of descriptor-only matching functions.
This matcher only requires descriptors (no LAFs). For geometry-aware matching that uses LAFs, see
GeometryAwareDescriptorMatcher.- See
match_nn(),match_snn(), match_mnn()ormatch_smnn()for more details.
- Parameters:
- See
- class kornia.feature.GeometryAwareDescriptorMatcher(match_mode='fginn', params=None)[source]¶
nn.Module version of geometry-aware matching functions that use LAFs (Local Affine Frames).
Unlike
DescriptorMatcher, this matcher requires both descriptors and LAFs. Seematch_fginn()ormatch_adalam()for more details.- Parameters:
- class kornia.feature.LocalFeatureMatcher(local_feature, matcher)[source]¶
nn.Module, which finds correspondences between two images based on local features.
- Parameters:
local_feature (
Module) – Local feature detector. SeeGFTTAffNetHardNet.matcher (
Module) – Descriptor matcher, seeDescriptorMatcher.
- Returns:
Dictionary with image correspondences and confidence scores.
- Return type:
Dict[str, torch.Tensor]
Example
>>> img1 = torch.rand(1, 1, 320, 200) >>> img2 = torch.rand(1, 1, 128, 128) >>> input = {"image0": img1, "image1": img2} >>> gftt_hardnet_matcher = LocalFeatureMatcher( ... GFTTAffNetHardNet(10), kornia.feature.DescriptorMatcher('snn', 0.8) ... ) >>> out = gftt_hardnet_matcher(input)
- forward(data)[source]¶
Run forward.
- Parameters:
data (
Dict[str,Tensor]) – dictionary containing the input data in the following format:- Keyword Arguments:
image0 – left image with shape \((N, 1, H1, W1)\).
image1 – right image with shape \((N, 1, H2, W2)\).
mask0 (optional) – left image mask. ‘0’ indicates a padded position \((N, H1, W1)\).
mask1 (optional) – right image mask. ‘0’ indicates a padded position \((N, H2, W2)\).
- Return type:
- Returns:
keypoints0, matching keypoints from image0 \((NC, 2)\).keypoints1, matching keypoints from image1 \((NC, 2)\).confidence, confidence score [0, 1] \((NC)\).lafs0, matching LAFs from image0 \((1, NC, 2, 3)\).lafs1, matching LAFs from image1 \((1, NC, 2, 3)\).batch_indexes, batch indexes for the keypoints and lafs \((NC)\).
- class kornia.feature.LightGlueMatcher(feature_name='disk', params=None)[source]¶
LightGlue-based matcher in kornia API.
This is based on the original code from paper “LightGlue: Local Feature Matching at Light Speed”. See [LSP23] for more details.
- Parameters:
- forward(desc1, desc2, lafs1, lafs2, hw1=None, hw2=None)[source]¶
Run forward.
- Parameters:
desc1 (
Tensor) – Batch of descriptors of a shape \((B1, D)\).desc2 (
Tensor) – Batch of descriptors of a shape \((B2, D)\).lafs1 (
Tensor) – LAFs of a shape \((1, B1, 2, 3)\).lafs2 (
Tensor) – LAFs of a shape \((1, B2, 2, 3)\).hw1 (
Optional[Tuple[int,int]], optional) – Height/width of image. Default:Nonehw2 (
Optional[Tuple[int,int]], optional) – Height/width of image. Default:None
- Return type:
- Returns:
Descriptor distance of matching descriptors, shape of \((B3, 1)\).
- Long torch.Tensor indexes of matching descriptors in desc1 and desc2,
shape of \((B3, 2)\) where \(0 <= B3 <= B1\).
- class kornia.feature.LightGlue(features='superpoint', **conf_)[source]¶
Implement the LightGlue matcher for sparse local features.
LightGlue is a deep network that matches local features across image pairs using a series of transformer layers and an adaptive pruning mechanism.
- Parameters:
features (
str, optional) – The type of local features to match (e.g., ‘superpoint’, ‘disk’). Default:"superpoint"conf – A configuration dictionary to override default parameters.
- forward(data)[source]¶
Match keypoints and descriptors between two images.
- Return type:
- Input (dict):
- image0: dict
keypoints: [B x M x 2] descriptors: [B x M x D] image: [B x C x H x W] or image_size: [B x 2]
- image1: dict
keypoints: [B x N x 2] descriptors: [B x N x D] image: [B x C x H x W] or image_size: [B x 2]
- Output (dict):
log_assignment: [B x M+1 x N+1] matches0: [B x M] matching_scores0: [B x M] matches1: [B x N] matching_scores1: [B x N] matches: List[[Si x 2]], scores: List[[Si]]
- class kornia.feature.LoFTR(pretrained='outdoor', config=default_cfg)[source]¶
nn.Module, which finds correspondences between two images.
This is based on the original code from paper “LoFTR: Detector-Free Local Feature Matching with Transformers”. See [SSW+21] for more details.
If the distance matrix dm is not provided,
torch.cdist()is used.- Parameters:
config (
dict[str,Any], optional) – Dict with initialization parameters. Do not pass it, unless you know what you are doing`. Default:default_cfgpretrained (
Optional[str], optional) – Download and set pretrained weights to the model. Options: ‘outdoor’, ‘indoor’. ‘outdoor’ is trained on the MegaDepth dataset and ‘indoor’ on the ScanNet. Default:"outdoor"
- Returns:
Dictionary with image correspondences and confidence scores.
Example
>>> img1 = torch.rand(1, 1, 320, 200) >>> img2 = torch.rand(1, 1, 128, 128) >>> input = {"image0": img1, "image1": img2} >>> loftr = LoFTR('outdoor') >>> out = loftr(input)
- forward(data)[source]¶
Run forward.
- Parameters:
data (
dict[str,Tensor]) – dictionary containing the input data in the following format:- Keyword Arguments:
image0 – left image with shape \((N, 1, H1, W1)\).
image1 – right image with shape \((N, 1, H2, W2)\).
mask0 (optional) – left image mask. ‘0’ indicates a padded position \((N, H1, W1)\).
mask1 (optional) – right image mask. ‘0’ indicates a padded position \((N, H2, W2)\).
- Return type:
- Returns:
keypoints0, matching keypoints from image0 \((NC, 2)\).keypoints1, matching keypoints from image1 \((NC, 2)\).confidence, confidence score [0, 1] \((NC)\).batch_indexes, batch indexes for the keypoints and lafs \((NC)\).
Interactive Demo¶
- class kornia.feature.OnnxLightGlue(weights=None, device='cpu')[source]¶
Wrapper for loading LightGlue-ONNX models and running inference via ONNXRuntime.
LightGlue [LSP23] performs fast descriptor-based deep keypoint matching. This module requires onnxruntime to be installed.
If you have trained your own LightGlue model, see https://github.com/fabio-sim/LightGlue-ONNX for how to export the model to ONNX and optimize it.
- Parameters:
weights (
str|None, optional) – Pretrained weights, or a path to your own exported ONNX model. Available pretrained weights are'disk','superpoint','disk_fp16', and'superpoint_fp16'. Note that FP16 requires CUDA. Defaults to'disk_fp16'ifdeviceis CUDA, and'disk'if CPU. Default:Nonedevice (
Union[str,device,None], optional) – Union[str, torch.device, None] to run inference on. Default:"cpu"
- forward(data)[source]¶
Match keypoints and descriptors between two images.
The output contains the matches (the indices of the matching keypoint pairs between the first and second image) and the corresponding confidence scores. Only a batch size of 1 is supported.
- Parameters:
data (
dict[str,dict[str,Tensor]]) – Dictionary containing both images and the keypoints and descriptors thereof.- Return type:
- Returns:
Dictionary containing the matches and scores.
data(dict):image0(dict):keypoints(float32): \((1, M, 2)\)descriptors(float32): \((1, M, D)\)image: \((1, C, H, W)\) orimage_size: \((1, 2)\)image1(dict):keypoints(float32): \((1, N, 2)\)descriptors(float32): \((1, N, D)\)image: \((1, C, H, W)\) orimage_size: \((1, 2)\)
output(dict):matches(int64): \((S, 2)\)scores(float32): \((S)\)
Local Affine Frames (LAF)¶
- kornia.feature.extract_patches_from_pyramid(img, laf, PS=32, normalize_lafs_before_extraction=True)[source]¶
Extract patches defined by LAFs from image torch.Tensor.
Patches are extracted from appropriate pyramid level.
- Parameters:
- Return type:
- Returns:
patches with shape \((B, N, CH, PS,PS)\).
- kornia.feature.extract_patches_simple(img, laf, PS=32, normalize_lafs_before_extraction=True)[source]¶
Extract patches defined by LAFs from image torch.Tensor.
No smoothing applied, huge aliasing (better use extract_patches_from_pyramid).
- Parameters:
- Return type:
- Returns:
patches with shape \((B, N, CH, PS,PS)\).
- kornia.feature.normalize_laf(LAF, images)[source]¶
Normalize LAFs to [0,1] scale from pixel scale.
- See below:
B,N,H,W = images.size() MIN_SIZE = min(H - 1, W -1) [a11 a21 x] [a21 a22 y] becomes: [a11/MIN_SIZE a21/MIN_SIZE x/(W-1)] [a21/MIN_SIZE a22/MIN_SIZE y/(H-1)]
- kornia.feature.denormalize_laf(LAF, images)[source]¶
De-F.normalize LAFs from scale to image scale.
The convention is that center of 5-pixel image (coordinates from 0 to 4) is 2, and not 2.5.
B,N,H,W = images.size() MIN_SIZE = min(H - 1, W -1) [a11 a21 x] [a21 a22 y] becomes [a11*MIN_SIZE a21*MIN_SIZE x*(W-1)] [a21*MIN_SIZE a22*MIN_SIZE y*(W-1)]
- kornia.feature.laf_to_boundary_points(LAF, n_pts=50)[source]¶
Convert LAFs to boundary points of the regions + center.
Used for local features visualization, see visualize_laf function.
- Parameters:
- Returns:
\((B, N, n_pts, 2)\)
- Return type:
torch.Tensor of boundary points LAF
- kornia.feature.ellipse_to_laf(ells)[source]¶
Convert ellipse regions to LAF format.
Ellipse (a, b, c) and upright covariance matrix [a11 a12; 0 a22] are connected by inverse matrix square root: A = invsqrt([a b; b c]).
See also https://github.com/vlfeat/vlfeat/blob/master/toolbox/sift/vl_frame2oell.m
- Parameters:
ells (
Tensor) – torch.Tensor \((B, N, 5)\) of ellipses in Oxford format [x y a b c].- Return type:
- Returns:
LAF \((B, N, 2, 3)\)
Example
>>> input = torch.ones(1, 10, 5) # BxNx5 >>> output = ellipse_to_laf(input) # BxNx2x3
- kornia.feature.make_upright(laf, eps=1e-9)[source]¶
Rectify the affine matrix, so that it becomes upright.
- Parameters:
- Returns:
\((B, N, 2, 3)\)
- Return type:
laf
Example
>>> input = torch.ones(1, 5, 2, 3) # BxNx2x3 >>> output = make_upright(input) # BxNx2x3
- kornia.feature.scale_laf(laf, scale_coef)[source]¶
Multiplies region part of LAF ([:, :, :2, :2]) by a scale_coefficient.
So the center, shape and orientation of the local feature stays the same, but the region area changes.
- Parameters:
- Return type:
- Returns:
LAF \((B, N, 2, 3)\)
Example
>>> input = torch.ones(1, 5, 2, 3) # BxNx2x3 >>> scale = 0.5 >>> output = scale_laf(input, scale) # BxNx2x3
- kornia.feature.get_laf_scale(LAF)[source]¶
Return a scale of the LAFs.
Example
>>> input = torch.ones(1, 5, 2, 3) # BxNx2x3 >>> output = get_laf_scale(input) # BxNx1x1
- kornia.feature.get_laf_center(LAF)[source]¶
Return a center (keypoint) of the LAFs.
The convention is that center of 5-pixel image (coordinates from 0 to 4) is 2, and not 2.5.
Example
>>> input = torch.ones(1, 5, 2, 3) # BxNx2x3 >>> output = get_laf_center(input) # BxNx2
- kornia.feature.rotate_laf(LAF, angles_degrees)[source]¶
Apply additional rotation to the LAFs.
Compared to set_laf_orientation, the resulting rotation is original LAF orientation plus angles_degrees.
- kornia.feature.get_laf_orientation(LAF)[source]¶
Return orientation of the LAFs, in degrees.
- Parameters:
LAF (
Tensor) – \((B, N, 2, 3)\)- Return type:
- Returns:
angle in degrees \((B, N, 1)\)
Example
>>> input = torch.ones(1, 5, 2, 3) # BxNx2x3 >>> output = get_laf_orientation(input) # BxNx1
- kornia.feature.set_laf_orientation(LAF, angles_degrees)[source]¶
Change the orientation of the LAFs.
- kornia.feature.laf_from_center_scale_ori(xy, scale=None, ori=None)[source]¶
Create a LAF from keypoint center, scale and orientation.
Useful to create kornia LAFs from OpenCV keypoints.
- Parameters:
- Return type:
- Returns:
LAF \((B, N, 2, 3)\)
- kornia.feature.laf_is_inside_image(laf, images, border=0)[source]¶
Check if the LAF is touching or partly outside the image boundary.
Returns the mask of LAFs, which are fully inside the image, i.e. valid.
- kornia.feature.laf_to_three_points(laf)[source]¶
Convert local affine frame(LAF) to alternative representation: coordinates of LAF center, LAF-x unit vector, LAF-y unit vector.
- kornia.feature.laf_from_three_points(threepts)[source]¶
Convert three points to local affine frame.
Order is (0,0), (0, 1), (1, 0).
- kornia.feature.KORNIA_CHECK_LAF(laf, raises=True)[source]¶
Check whether a Local Affine Frame (laf) has a valid shape.
- Parameters:
- Raises:
ShapeError – if the input laf does not have a shape \((B,N,2,3)\) and raises is True.
- Return type:
Note
Checks can be disabled in Python mode using disable_checks() or the KORNIA_CHECKS environment variable. In TorchScript-compiled code, checks always run (TorchScript cannot access module-level globals, but the validation logic is fast). When running with python -O, Python’s optimizer may eliminate some checks.
Example
>>> lafs = torch.rand(2, 10, 2, 3) >>> KORNIA_CHECK_LAF(lafs) True
- kornia.feature.perspective_transform_lafs(trans_01, lafs_1)[source]¶
Apply perspective transformations to a set of local affine frames (LAFs).
- Parameters:
- Return type:
- Returns:
torch.Tensor of N-dimensional points of shape \((B, N, 2, 3)\).
Examples
>>> rng = torch.manual_seed(0) >>> lafs_1 = torch.rand(2, 4, 2, 3) # BxNx2x3 >>> lafs_1 tensor([[[[0.4963, 0.7682, 0.0885], [0.1320, 0.3074, 0.6341]], [[0.4901, 0.8964, 0.4556], [0.6323, 0.3489, 0.4017]], [[0.0223, 0.1689, 0.2939], [0.5185, 0.6977, 0.8000]], [[0.1610, 0.2823, 0.6816], [0.9152, 0.3971, 0.8742]]], [[[0.4194, 0.5529, 0.9527], [0.0362, 0.1852, 0.3734]], [[0.3051, 0.9320, 0.1759], [0.2698, 0.1507, 0.0317]], [[0.2081, 0.9298, 0.7231], [0.7423, 0.5263, 0.2437]], [[0.5846, 0.0332, 0.1387], [0.2422, 0.8155, 0.7932]]]]) >>> trans_01 = torch.eye(3).repeat(2, 1, 1) # Bx3x3 >>> trans_01.shape torch.Size([2, 3, 3]) >>> lafs_0 = perspective_transform_lafs(trans_01, lafs_1) # BxNx2x3
- class kornia.feature.PassLAF(*args, **kwargs)[source]¶
Dummy module to use instead of local feature orientation or affine shape estimator.
- class kornia.feature.PatchAffineShapeEstimator(patch_size=19, eps=1e-10)[source]¶
Module, which estimates the second moment matrix of the patch gradients.
The method determines the affine shape of the local feature as in [Baumberg00].
- Parameters:
- class kornia.feature.LAFAffineShapeEstimator(patch_size=32, affine_shape_detector=None, preserve_orientation=True)[source]¶
Module, which extracts patches using input images and local affine frames (LAFs).
Then runs
PatchAffineShapeEstimatoron patches to estimate LAFs shape.Then original LAF shape is replaced with estimated one. The original LAF orientation is not preserved, so it is recommended to first run LAFAffineShapeEstimator and then LAFOrienter,
- Parameters:
patch_size (
int, optional) – the input image patch size. Default:32affine_shape_detector (
Optional[Module], optional) – Patch affine shape estimator,PatchAffineShapeEstimator. Default:Nonepreserve_orientation (
bool, optional) – if True, the original orientation is preserved. Default:True
- class kornia.feature.LAFOrienter(patch_size=32, num_angular_bins=36, angle_detector=None)[source]¶
Module, which extracts patches using input images and local affine frames (LAFs).
Then runs
PatchDominantGradientOrientationorOriNeton patches and then rotates the LAFs by the estimated angles- Parameters:
patch_size (
int, optional) – Default:32num_angular_bins (
int, optional) – Default:36angle_detector (
Optional[Module], optional) – Patch orientation estimator, e.g.PatchDominantGradientOrientationor OriNet. Default:None
- class kornia.feature.PatchDominantGradientOrientation(patch_size=32, num_angular_bins=36, eps=1e-8)[source]¶
Module, which estimates the dominant gradient orientation of the given patches, in radians.
Zero angle points towards right.
- Parameters:
- class kornia.feature.OriNet(pretrained=False, eps=1e-8)[source]¶
Network, which estimates the canonical orientation of the given 32x32 patches, in radians.
Zero angle points towards right. This is based on the original code from paper “Repeatability Is Not Enough: Learning Discriminative Affine Regions via Discriminability””. See [MRM18] for more details.
- Parameters:
- Returns:
Angle in radians.
- Shape:
Input: (B, 1, 32, 32)
Output: (B)
Examples
>>> input = torch.rand(16, 1, 32, 32) >>> orinet = OriNet() >>> angle = orinet(input) # 16
- class kornia.feature.LAFAffNetShapeEstimator(pretrained=False, preserve_orientation=True)[source]¶
Module, which extracts patches using input images and local affine frames (LAFs).
Then runs AffNet on patches to estimate LAFs shape. This is based on the original code from paper “Repeatability Is Not Enough: Learning Discriminative Affine Regions via Discriminability””. See [MRM18] for more details.
Then original LAF shape is replaced with estimated one. The original LAF orientation is not preserved, so it is recommended to first run LAFAffineShapeEstimator and then LAFOrienter.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default:False
Layers¶
- class kornia.feature.FilterResponseNorm2d(num_features, eps=1e-6, is_bias=True, is_scale=True, is_eps_leanable=False)[source]¶
Feature Response Normalization layer from ‘Filter Response Normalization Layer: Eliminating Batch Dependence in the Training of Deep Neural Networks’, see [SK20] for more details.
\[y = \gamma \times \frac{x}{\sqrt{\mathrm{E}[x^2]} + |\epsilon|} + \beta\]- Parameters:
- Returns:
Normalized features
- Return type:
- Shape:
Input: \((B, \text{num_features}, H, W)\)
Output: \((B, \text{num_features}, H, W)\)
- class kornia.feature.TLU(num_features)[source]¶
TLU layer from ‘Filter Response Normalization Layer: Eliminating Batch Dependence in the Training of Deep Neural Networks, see [SK20] for more details. \({\tau}\) is learnable per channel.
\[y = \max(x, {\tau})\]- Parameters:
num_features (
int) – number of channels- Returns:
torch.Tensor
- Shape:
Input: \((B, \text{num_features}, H, W)\)
Output: \((B, \text{num_features}, H, W)\)
Other¶
- class kornia.feature.DeFMO(pretrained=False)[source]¶
nn.Module that disentangle a fast-moving object from the background and performs deblurring.
- This is based on the original code from paper “DeFMO: Deblurring and Shape Recovery
of Fast Moving Objects”. See [ROF+21] for more details.
- Parameters:
pretrained (
bool, optional) – Download and set pretrained weights to the model. Default: false.- Returns:
Temporal super-resolution without background.
- Shape:
Input: (B, 6, H, W)
Output: (B, S, 4, H, W)
Examples
>>> import kornia >>> input = torch.rand(2, 6, 240, 320) >>> defmo = kornia.feature.DeFMO() >>> tsr_nobgr = defmo(input) # 2x24x4x240x320
- forward(input_data)[source]¶
Deblur a fast-moving object into a sequence of RGBA sub-frames.
- Parameters:
input_data (
Tensor) – Tensor with shape \((B, 6, H, W)\) containing the blurred RGB image concatenated with an RGB background estimate.- Return type:
- Returns:
Tensor with shape \((B, T, 4, H, W)\), where
Tis the number of temporal sub-frames and 4 stores red, green, blue, and alpha channels.